新聞中心
產(chǎn)品中心
- >>兩相步進電機
- >>無刷電機
- >>三相步進電機
- >>行星減速機
- >>直流無刷電機
- >>兩相步進驅(qū)動器
- >>直流無刷驅(qū)動器
- >>三相步進驅(qū)動器
- >>直流無刷伺服驅(qū)動器
- >>韓國GGM電機減速機
聯(lián)系我們

深圳市東么川伺服控制技術(shù)有限公司
電話:13316379101
郵箱:1355229533@qq.com
地址:深圳市龍華區(qū)民治街道樟坑社區(qū)青創(chuàng)城A棟B502
伺服電機是通過什么驅(qū)動方式驅(qū)動的
發(fā)布時間:2020-07-06 09:51:09
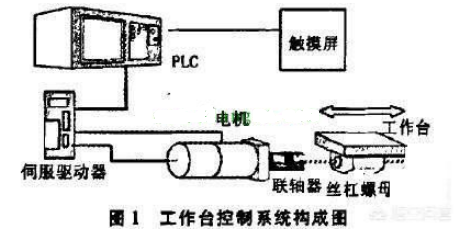
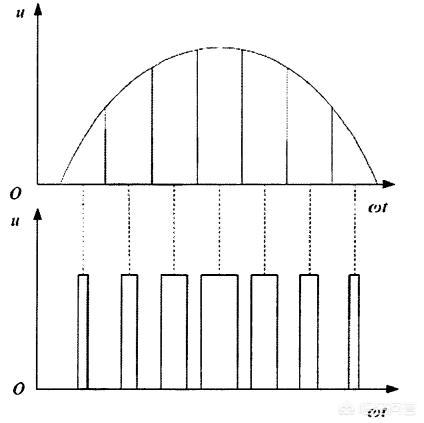
不是簡單的放大,PLC的輸出只是方波,而驅(qū)動器的輸出是正弦波??梢岳斫?,PLC的脈沖是伺服驅(qū)動器的工作指令,如領(lǐng)導(dǎo)的工作指令。伺服驅(qū)動器是為領(lǐng)導(dǎo)工作的官員。如果領(lǐng)導(dǎo)要求官員這樣做,如何做官員的具體工作應(yīng)由他自己決定。伺服驅(qū)動器可以理解為滿足伺服電機要求的交流電源。它在驅(qū)動伺服電機時,不簡單地放大PLC的脈沖,而是了解這些脈沖的作用,然后通過PWM方式控制伺服電機,模擬輸出正弦波。
一般來說,PLC發(fā)送的脈沖都是pls脈沖,即脈沖寬度和間隔都是固定的方波。方波的數(shù)量可以理解為“步距”,即當(dāng)脈沖下來時,伺服電機需要采取“一步”(即旋轉(zhuǎn)多少角度)。因此,方波的數(shù)目越多,伺服電機的旋轉(zhuǎn)角度就越大,伺服驅(qū)動器需要輸出的使伺服電機旋轉(zhuǎn)角度的波形就消失了,但伺服電機不能像步進電機那樣依靠電機的簡單結(jié)構(gòu)。它需要一個位置環(huán)來實現(xiàn)閉環(huán),即通過編碼器的脈沖來測量當(dāng)前電機的角度變化,然后通過PID來調(diào)節(jié)輸出電壓和頻率。
換言之,伺服驅(qū)動器應(yīng)將接收到的PLC脈沖與電機反饋的編碼器脈沖(可以簡單理解為減法)進行比較,經(jīng)PID計算后輸出一個值,然后交給所謂的速度環(huán)和電流環(huán),再進行計算,最后通過PWM方式控制IGBT模塊,并輸出一定的方波來模擬正弦波來控制伺服電機的轉(zhuǎn)速,以滿足它旋轉(zhuǎn)的角度位置。從根本上講,伺服驅(qū)動器和矢量變換器的控制是相似的。
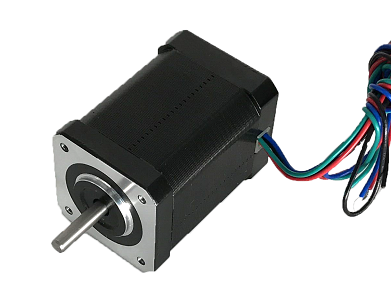
產(chǎn)品推薦:兩相步進電機




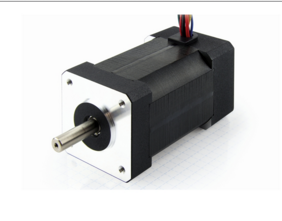
產(chǎn)品推薦:無刷電機






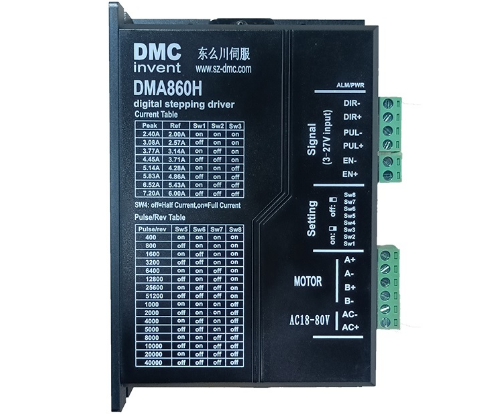
產(chǎn)品推薦:兩相步進驅(qū)動器





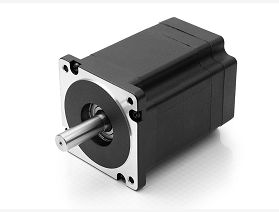
產(chǎn)品推薦:直流無刷驅(qū)動器






 地址 ADDRESS
地址 ADDRESS